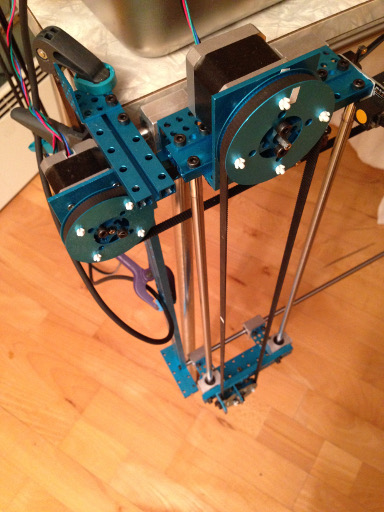
When making sound recordings, sound instruments, or other sound related stuff, it is important that the working robots stay quiet. This is the reason I built this silent robot.
When oiled, the mechanics are fairly silent. What usually makes noise in robots like this are the stepping of the stepper motors.
Using microstepping helps a lot, but I went further.
I use dither stepping, where microstepping and digital
signal processing are combined directly with cybernetics
to give smooth silent movement to the robot.
(The mechanics make some small noise when moved very fast.)